4645Z-4 - Fundamentos de Computação Gráfica
Trabalho III - Robô Articulado Atirador
Prof. Márcio Sarroglia Pinho
Este trabalho pode ser desenvolvido em duplas ou individualmente.
Objetivo
Criar jogo, em 3D, no qual o usuário controla um veículo na forma de um robô articulado. O objetivo do usuário é destruir inimigos que estão no cenário, posicionados atrás de um paredão, lançando projéteis
a partir da posição do canhão. Caso um projétil atinja o paredão, parte
dele deve ser destruído, bem como o projétil. O mesmo deve ocorrer com
o piso. No cenário também existem objetos amigos, que não devem ser destruídos.
Piso e Paredão
O piso deve representar um terreno de 50m x 25m. Este terreno deve ser modelado por polígons quadrados de 1m x 1m.
O paredão tem altura de 15m e deve ficar posicionado
no meio do cenário dividindo a dimensão maior em duas partes iguais.
Este paredão deve ser modelado por polígonos quadrados de 1m x 1m.
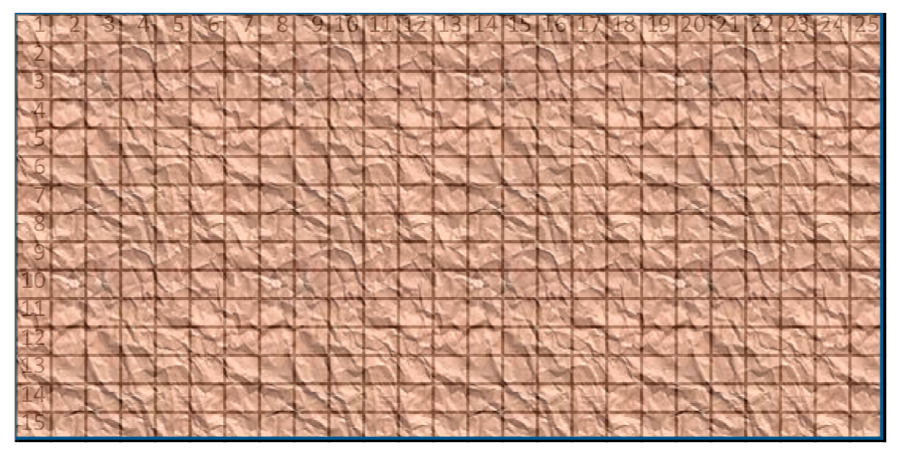 Figura - Vista Frontal do Paredão
Figura - Vista Frontal do Paredão
O piso deve receber a aplicação de uma textura
semelhante a grama. O paredão deve receber a aplicação de uma textura
semelhante a tijolos.
Cada uma destas texturas deve ser uma única
imagem. Desta forma, cada polígono que compõe cada um dos os
objetos deve receber a aplicação de uma parte da imagem.
Ao ser atingido por um projétil, o polígono que
compõe o paredão deve deixar de ser renderizado e não gera mais colisão
com o projétil, nem com o veículo.
A figura a seguir exemplifica uma vista superior do cenário. Nesta figura, cada célula tem 1m x 1m.
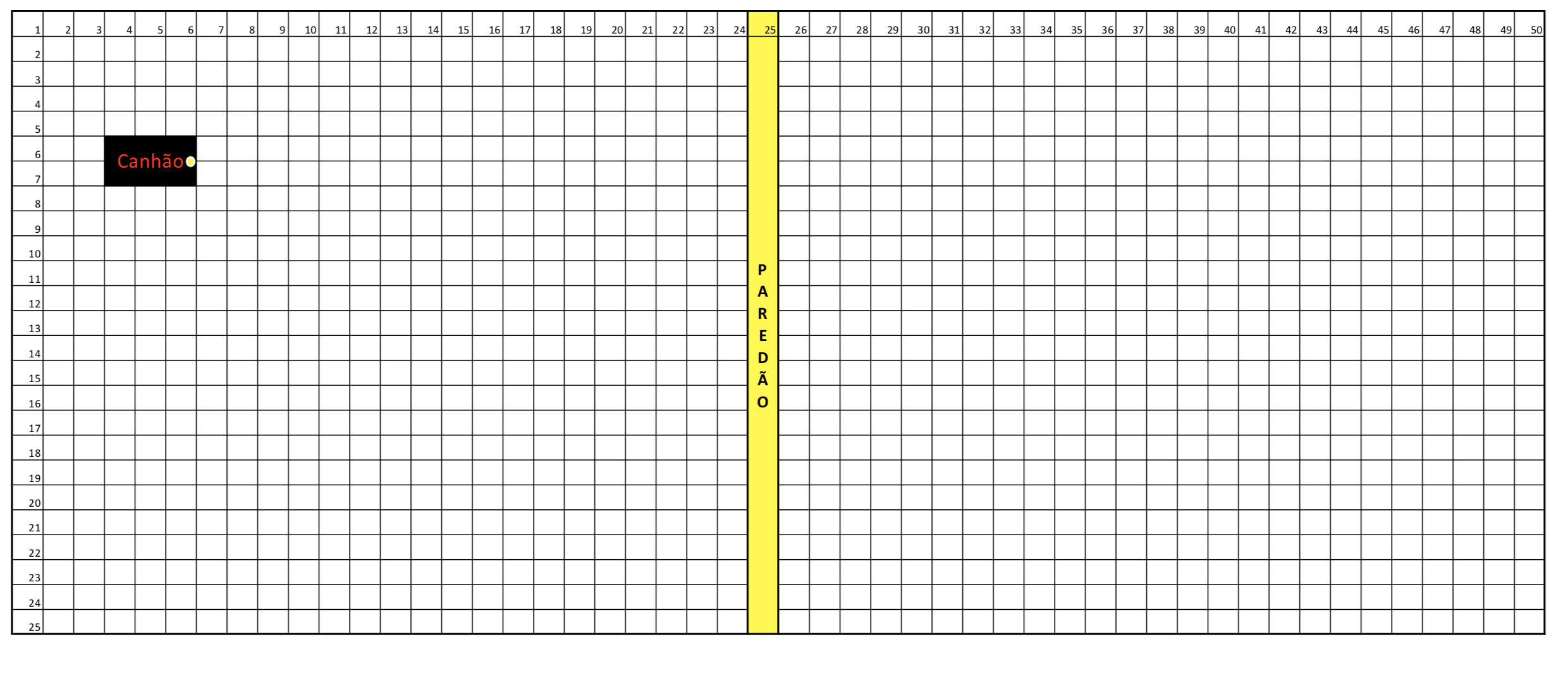 Figura - Vista Superior do Cenário
Figura - Vista Superior do Cenário
Veículo
O veículo possui um lançador de projéteis articulado, formado, por uma base(paralelepípedo) e dois segmentos cilíndricos.
A base do veículo deve ter comprimento de 3m x largura de 2m.
A figura a seguir apresenta uma vista ortográfica do veículo.
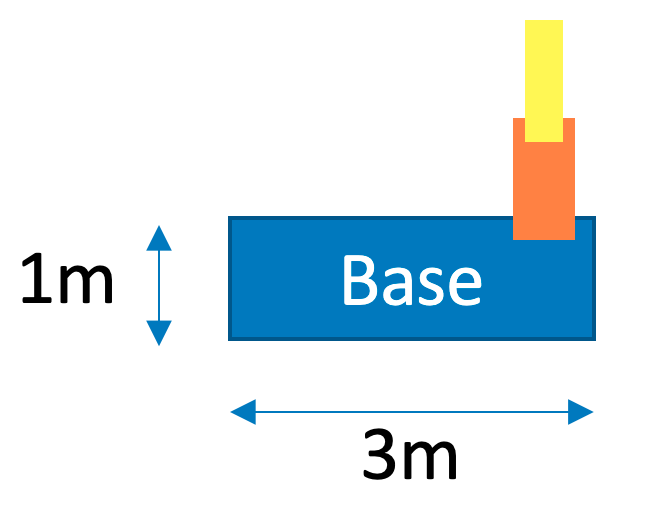
Figura - Vista Lateral do Veículo
Os segmentos são conectados por articulações.
Cada articulação deve ser controlada por uma tecla distinta,
utilizando, por exemplo, a seguinte convenção:
- A/a - Move articulação 1 no sentido horário/anti-horário
- B/b - Move articulação 2 no sentido horário/anti-horário
O primeiro segmento (conectado na base) deve
girar no eixo Y e o segundo deve girar de forma a se inclinarem para a
frente do robô, quando a rotação do primeiro segmento estiver em 0 graus.
Deve ser possível aumentar e diminuir a força de lançamento do projétil com teclas, usando a mesma convenção das articulações.
A força máxima deve ser tal que com um ângulo de inclinação de 45
graus, deve ser possível passar sobre o paredão, estando a 12 metros
dele.
Projéteis
Os projéteis devem ser representados por esferas compatíveis com o tamanho do canhão.
O movimento dos projéteis devem seguir a formulação da física de lançamento de projéteis. A direção inicial do projétil é dada pela direção do lançador.
Ao atingir um objeto do cenário, este objeto deve desaparecer, contabilizando uma pontuação, utilizando a seguinte convenção:
- Objeto inimigo: +10 pontos
- Objeto amigo: +10 pontos
- Piso: -5 pontos
- Paredão: +5 pontos
- Canhão: fim do jogo
No caso de colisão com o paredão, devem ser destruídos os 8 (oito) polígonos ao redor do polígono que foi atingido.
A velocidade do projétil é de 10m/s. Como isto, o projétil atravessa o cenário, em sua dimensão maior, 5 segundos.
Objetos do Cenário
O cenário deve conter pelo menos 40 objetos 3D
lidos de arquivo no formato TRI. Metade deles deve ser de inimigos e
metade de amigos.
Estes objetos devem vir de arquivos em algum formato 3D. Podem ser lidos, por exemplo de arquivos no formato TRI ou OBJ ou FBX.
Para obter objetos no formato TRI, pode ser usado o conversor i3dConvert http://3doc.i3dconverter.com/index.html. Para converter objetos de FBX para OBJ pode ser usado o site http://www.greentoken.de/onlineconv.
Depois de converter para OBJ, este pode ser convertido TRI com o
i3dConvert já citado (as dicas sobre as conversões são do aluno
Vinicius C. Teixeira).
Entrega
- Data de entrega no Moodle e apresentação: 26/11/2020 até o horário da aula.
- Os trabalhos podem ser desenvolvidos em
duplas. Os arquivos, contendo os fontes do programa, devem ser
compactados e submetidos pelo Moodle até a data e hora especificadas.
ENVIE APENAS ARQUIVOS .ZIP, ou seja, não envie 7z, rar, tar.gz, tgz,
tar.bz2, etc.
- A nota do trabalho depende da
apresentação deste no laboratório, na data marcada. Trabalhos entregues
mas não apresentados terão sua nota anulada automaticamente. Durante a
apresentação será avaliado o domínio da resolução do problema, podendo
inclusive ser possível invalidar o trabalho quando constatada a falta
de conhecimento sobre
- A cópia parcial ou completa do trabalho terá como consequência a atribuição de nota ZERO ao trabalho dos alunos envolvidos.
FIM.

